
光学编码器由于功能类似,很难比较。磁性编码器作为以数字形式提供附着在机械轴上的磁体角度的器件,常用“分辨率”作为其关键的规格参数,用来代表传感器能够辨识的最小角度。由于在宣传和技术文档中分辨率的定义方式不同,用户在比较产品时常常被误导。
本文提出了分辨率最具意义的定义方法,可以帮助用户在各种各样的产品数据手册中始终清晰地确定分辨率。 文章还将说明,对于磁性编码器,单靠分辨率是不足以充分比较产品的;很多磁性位置传感器数据手册中缺失的传感器带宽,也是比较磁性角度传感器必要的参数。
测量误差
在定义分辨率之前,首先需要澄清有关测量误差的一些要点。测量误差被定义为一个参数的测量值与其真实值之间的差异。此误差由两个部分构成,如下所述:
系统(或偏移)误差:在相同的条件下进行多次测量,其中保持不变的分量即为系统误差。该误差是大量测量的平均值与被测参数真实值之间的差异估值。
随机误差:随机误差为总误差减去系统误差。代表了在相同条件下执行的一组测量中不可预测的变化。
图 1 所示为随机误差和系统误差的不同组合情况。其中包括三组测量值,分别具有不同数量的随机误差和系统误差。A组随机误差较大,B组系统误差较大,而C组则具有相似的随机误差和系统误差。

图 1:随机误差和系统误差的不同组合情况
在磁性角度传感器的数据手册中,系统误差和随机误差分别表示为 INL 和分辨率。为简单起见,本文将假设传感器没有系统误差,这意味着平均值即真实值。
了解伺服控制回路中的角度位置传感器分辨率与带宽
探索磁性角度位置传感器的主要规格及优势
文章 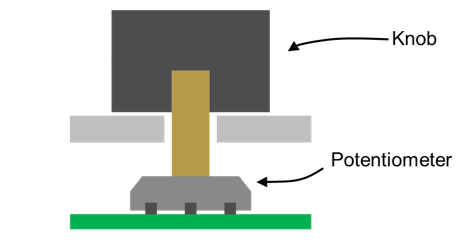
采用磁传感器提升触觉人机界面的可靠性
本文为设计高性价比的非接触式 HMI 解决方案提供了简单的设计指南,该方案拥有无可比拟的使用寿命和低功耗。
MA600(MA600)(MA600(MA600))是光学编码器的有力竞争者,可以完美替代市场现有的霍尔角度位置传感器。
应用模块
机器人
探讨MPS在机器人领域的集成电机驱动器和电池管理 IC 解决方案
标准偏差和置信度
在测量中用于量化随机误差的指标称为标准偏差 (σ)。在统计学中,σ 衡量一组样本在其平均值附近的分散度。分散度越高,σ 越高。该参数也称为均方根 (RMS) 噪声。
当随机变化不依赖于过去的误差时,测量数据集通常遵循钟形曲线分布,也称为高斯或正态曲线(见图 2)。高斯曲线在测量平均值 (µ) 处达到峰值,σ 表征其宽度。如果将高斯曲线下的总面积归一化为 1,则由[a1, a2] 值范围界定的面积就是测量结果落在 a1 和 a2 之间某处的概率。范围越大,单个测量值落入该范围的置信度就越高。
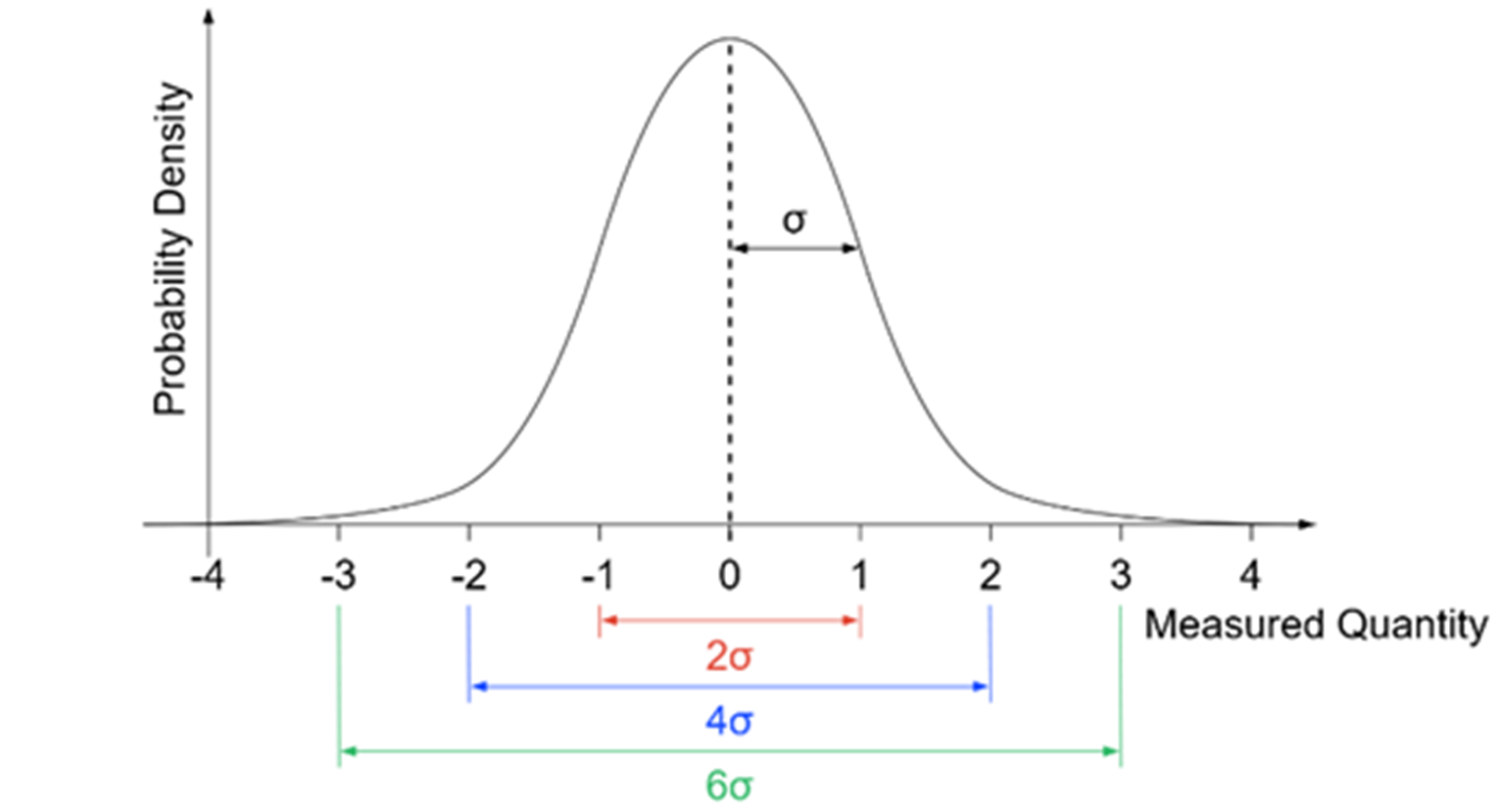
图2: 高斯分布(µ = 0 和σ = 1)
表 1 列出了测量值在 [µ - nσ, µ + nσ] 范围内的概率或置信度。
表 1:部分n 值的置信因子
| n | 置信度(%) |
| 1 | 68.269 |
| 2 | 95.450 |
| 3 | 99.730 |
| 4 | 99.993 |
定义分辨率
美国国家标准与技术研究院 (NIST) 将分辨率定义为“ 测量系统检测并准确指示出测量结果特征微小变化的能力”。
分辨率是仪器可以检测到的最小区间。为确定这个区间,本文将假设随机误差的分布遵循高斯分布。这就引出了一个问题:对磁性角度传感器而言,两个角度应相距多远,才能以相当高的概率区分?
当两个角度之间的距离小于6σ时,以角度为中心的两个噪声分布明显重叠(如图3中的A)。 如果测量结果落在重叠区域,则无法知道真正的角度是角度a1还是角度a2。只有当两个角度之间的距离等于或大于 6σ 时,单次测量才能以等于或高于 99.73% 的置信度区分这两个点(如图3中的B)。传感器的分辨率为一个6σ区间。
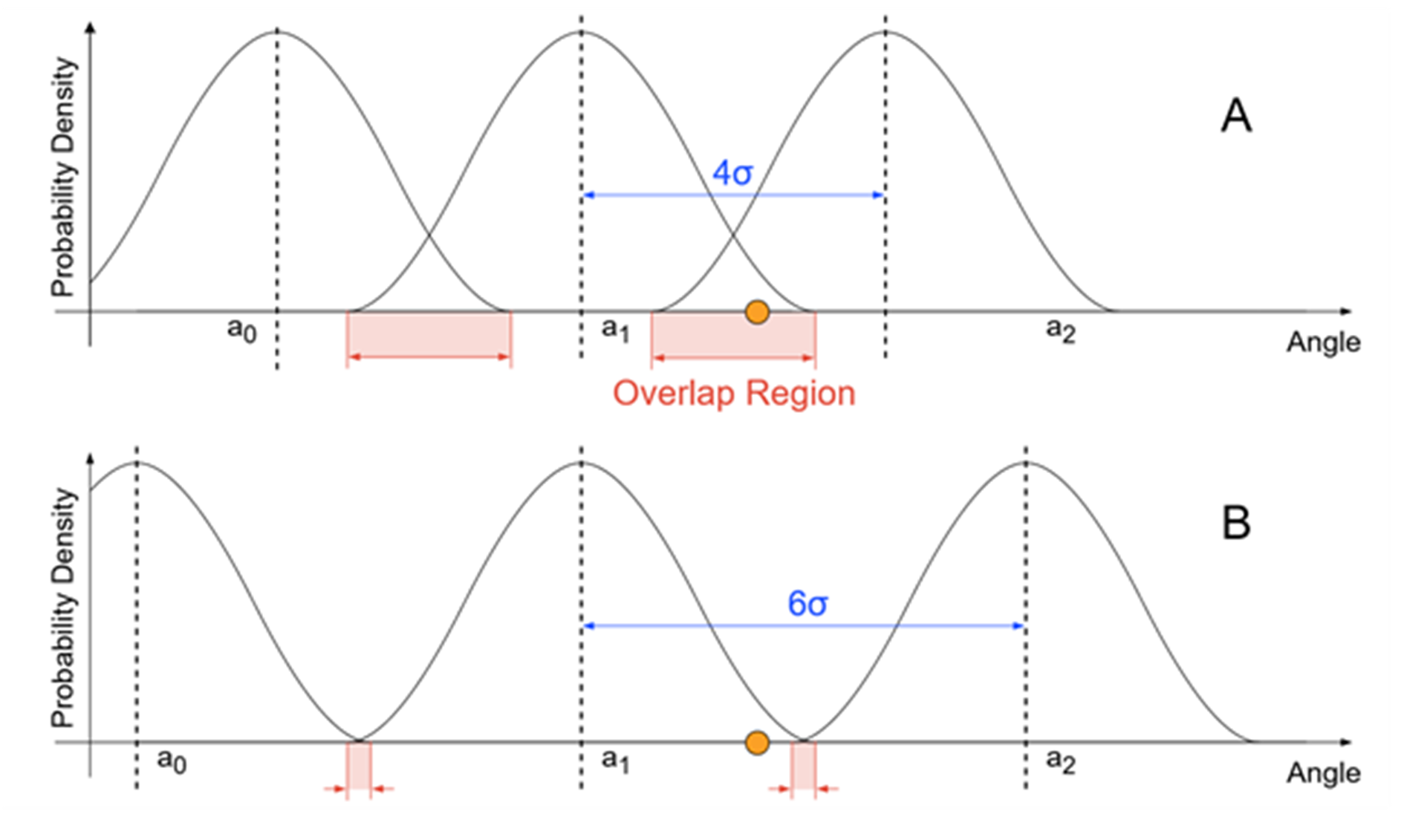
图 3:以 µ1 为中心的 6σ 区间中包含的样本
模数转换
位置传感器的输出通常以数字形式给出,例如,通过 ABZ 或 SPI 接口提供。在这种情况下,来自磁性传感器的模拟信号必须被数字化。图 4 显示了数字磁角度传感器的简化框图。注意,图中包含的滤波器模块,我们将在下一节进一步讨论。
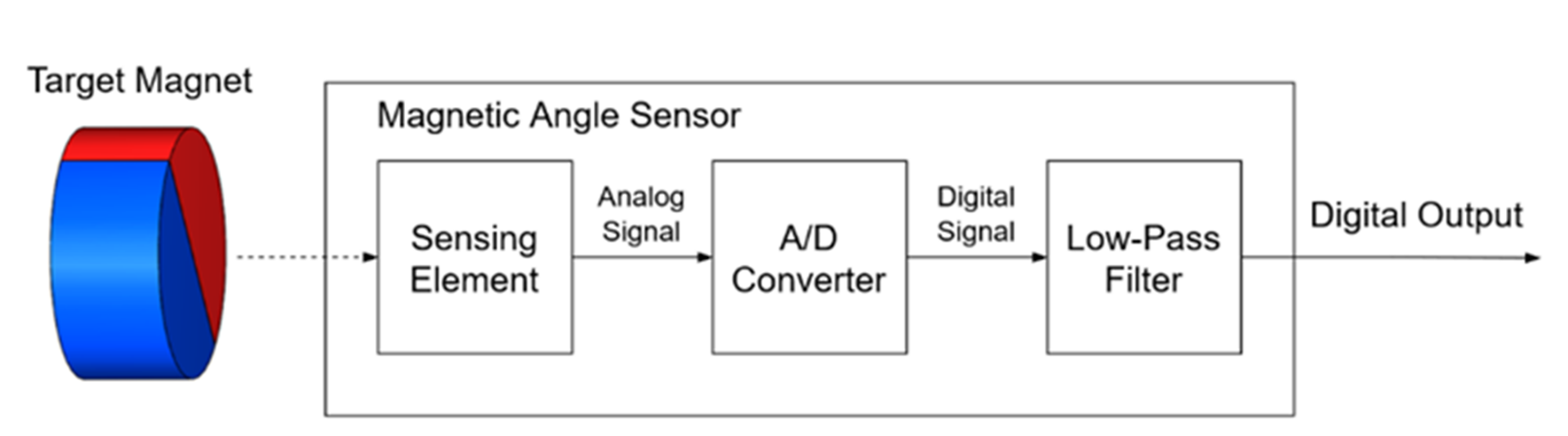
图4: 数字磁角度传感器功能框图
AD 转换的步长(即模拟域中值的范围除以数字域中的步数)通常被错误地解释为传感器的分辨率。 实际上只有当模拟信号的峰峰值噪声小于 AD 转换的步长时,这种解释才是正确的。
然而在大多数情况下并非如此。模拟信号的峰峰值噪声常常超过 AD 步长,在传感器的数字输出中表现为输出端最低有效位 (LSB) 的随机闪烁。这也是模数转换器 (ADC) 制造商还会定义“无噪声分辨率”或“峰峰值分辨率”等指标的原因。
图 5 显示了噪声如何从模拟域传输到数字域。在此示例中,步长为 1,峰峰值噪声为 6。连续分布和离散分布分别显示于 X 轴和 Y 轴上。由于噪声超过数字步长,因此减小步长并不会提高分辨率。
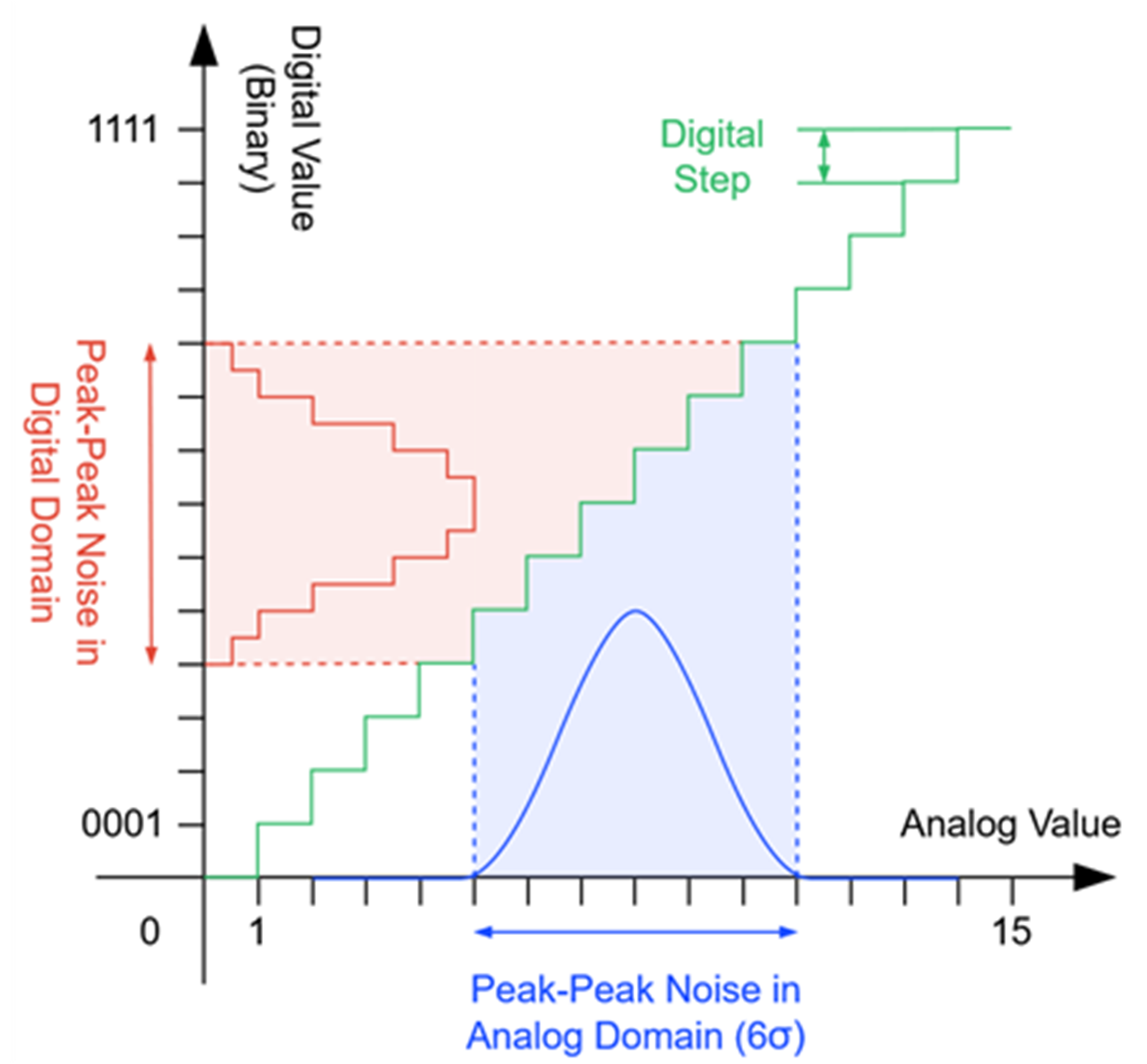
图5: 模数转换中的噪声
当以数字格式提供测量值时,分辨率也可用位(bit)来表示,并用公式 (1) 计算:
$$resolution_{bit} = log_2 frac {FS}{6 sigma}$$
其中 FS 为测量值的满量程。
如果是角度测量,则FS = 360°,分辨率可以通过公式 (2) 来估算:
$$resolution_{bit} = log_2 frac {360}{6 sigma}$$
带宽
讨论传感器性能时,常常会忽视一个关键参数,即带宽,也称为截止频率。传感器带宽对应于信号的频率范围,可由传感器测量。大于传感器带宽的频率信号会被衰减。传感器的详细表征需要以分析或图形形式呈现的传递函数,至少也应提供截止频率。
如图 4所示,低通滤波器级可以在传感器中实现,用于降低传感器输出上的噪声。在这种情况下,传感器带宽与滤波器带宽相同。如果噪声分布为高斯分布,则滤波器带宽降低 4 倍会使噪声降低 2 倍,从而将分辨率提高 1 位。这意味着有关噪声或分辨率的信息应与带宽相关信息对应。
但对应用而言,带宽太低又会带来重大影响。如果传感器位于控制回路之内,系统可能会不稳定,电机可能出现振荡、噪声和/或效率损失(见图 6)。在图6中,R 是位置参考,AM 是电机轴角度,AS 是传感器输出。常见的设计规则是,让滤波器带宽至少比控制系统或控制回路带宽大十倍。
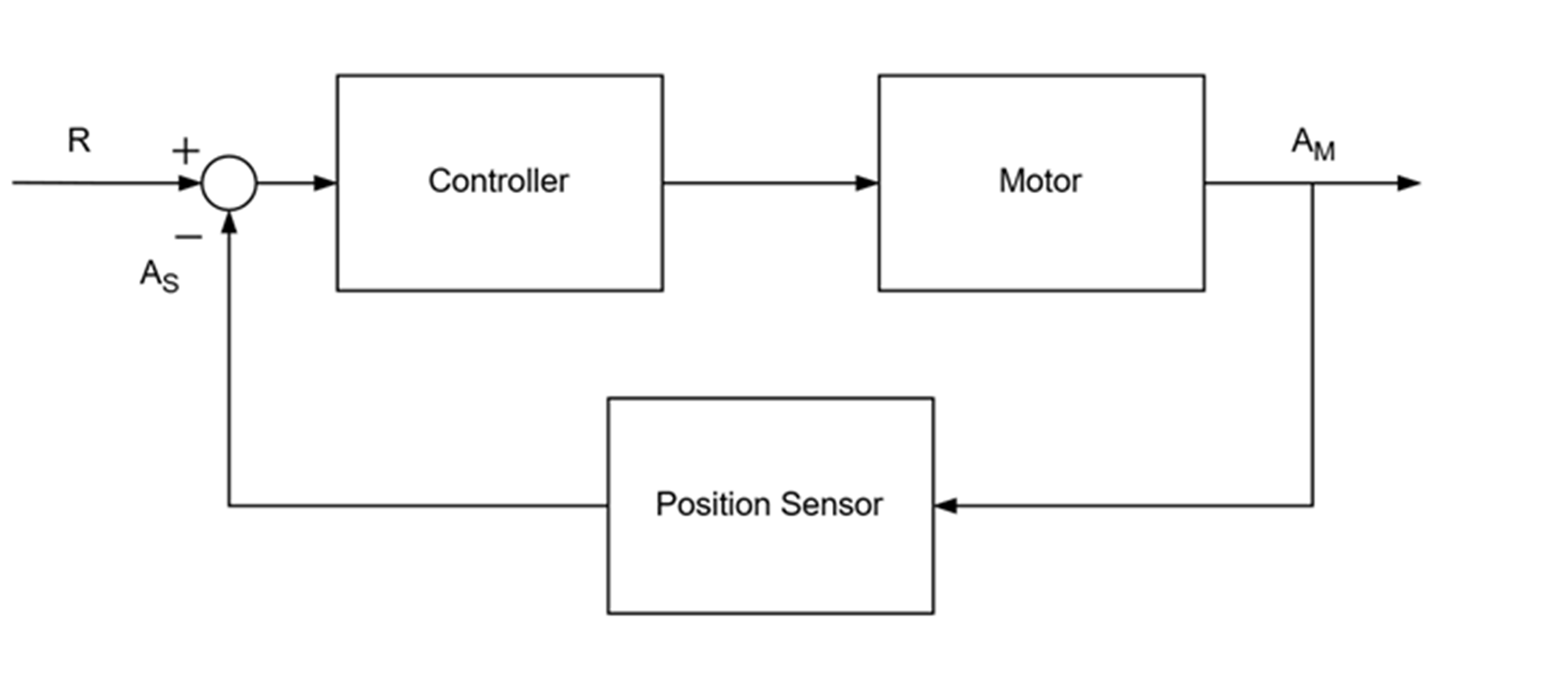
图6: 电机控制环路
图 7、图 8 和图 9 分别显示了低通滤波器带宽 (BW) 对角度测量、噪声和控制环路性能的影响。
图 7 显示出,具有高带宽滤波器的传感器输出与电机轴角度几乎重叠(分别用蓝线和绿线表示)。 而具有较低带宽滤波器的传感器输出则无法精确跟随电机的轴位置(用红线表示)。
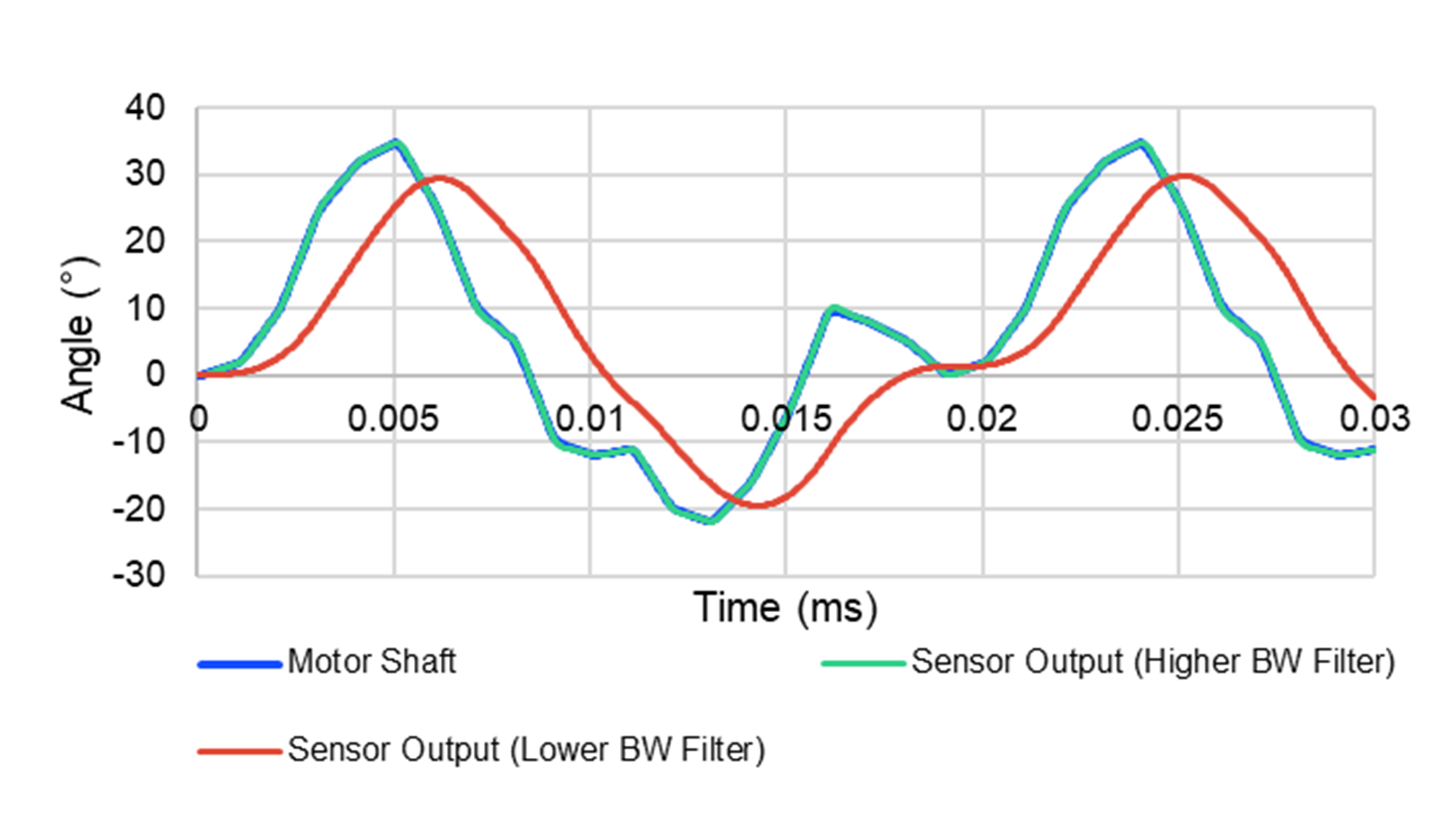
图 7:滤波器带宽对传感器输出的影响
将BW 滤波器用于角度传感器可显著降低噪声(参见图 8)。带宽越低,噪声衰减得越多。
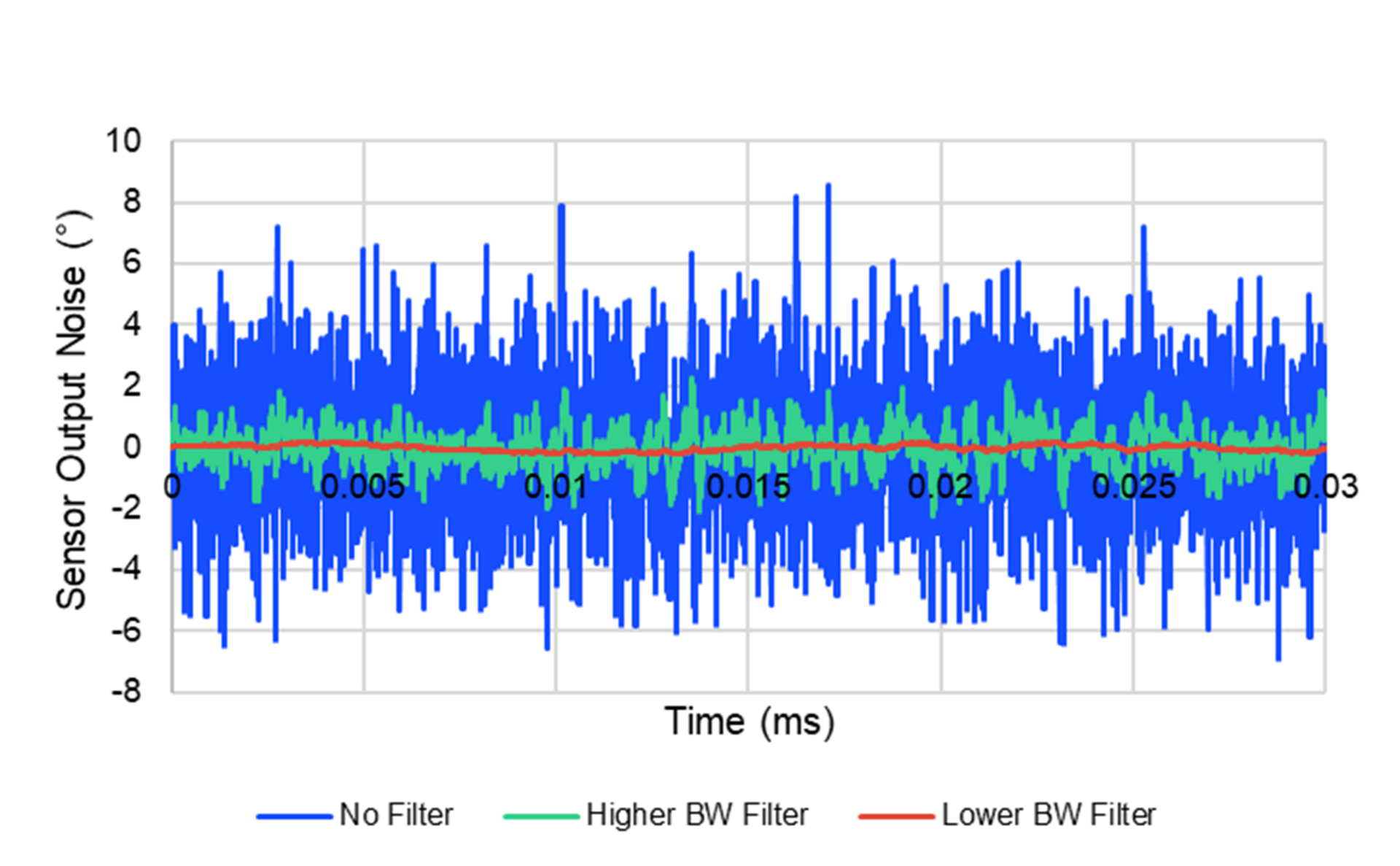
图 8:滤波器带宽对传感器输出噪声的影响
图 9 显示了不同的滤波器带宽对电机控制环路性能的影响。具有较低带宽的滤波器(用红线表示)过冲更多,稳定时间也更长。
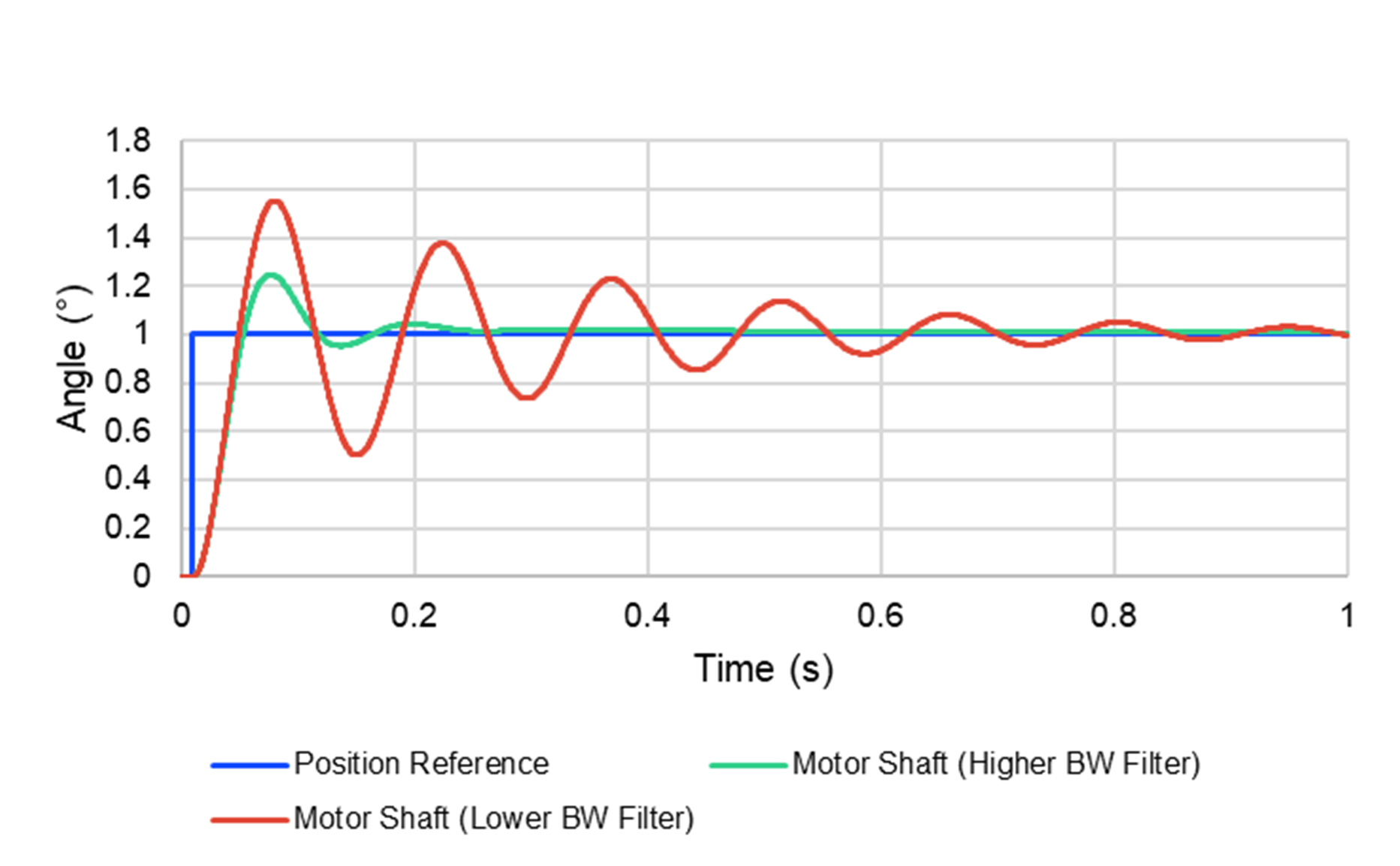
图 9:滤波器带宽对电机控制回路性能的影响
数据手册中的相关指标
为确保传感器适合您的应用,区分数字步长和实际的传感器分辨率非常重要。
通常,当数据手册中列出了 SPI 分辨率、AD 分辨率和 ABZ 分辨率等指标时,只表明了测量的数字表达位数,而不是实际的传感器分辨率。
传感器数据手册中的RMS 噪声、峰峰值噪声、角度噪声或噪声密度等指标才是获得传感器分辨率的可靠来源。设计人员可以通过公式 (1) 来计算以位表示的分辨率。
表 2 为一个数据手册的示例。这种分辨率具有误导性,因为实际上是指数字步长。如果滤波器带宽是可配置的,则可能列出多个噪声值。实际分辨率可用表中所列的最低噪声值并通过公式 (3) 来计算:
$$resolution_{bit} = log_2 frac {360}{6 sigma} = log_2 frac {360}{0.06} = 12.55$$
通过比较分辨率和带宽,可以确定产品之间的实际性能差异。滤波器带宽可以通过多个参数来表示,例如时间常数、阶跃响应或截止频率。表 2 中的示例采用了滤波器时间常数和截止频率。
表2: 数据手册示例
| 参数 | 符号 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
| 分辨率 | RES | - | 14 | - | 位数位数 | |
| RMS噪声 | σ | 滤波器设置=0 | 004.004 | 0.08 0.08 | 0.14 | deg |
| 滤波器设置=3 | 0.006 | 0.01 | 0.017 | deg | ||
| 滤波器时间常数 | τ | 滤波器设置=0 | - | 125 | - | µs |
| 滤波器设置=3 | - | 1000千 | - | µs | ||
| 滤波器截止频率 | f技 技 技 技 技 技 技 技 技 | 滤波器设置=0 | - | 3,00000 | - | Hz |
| 滤波器设置=3 | - | 350 | - | Hz |
MPS传感器性能
对大多数 MPS 角度传感器,数据的数字表达位数均为 16 位;与此分辨率、传感技术(霍尔或 TMR)和滤波器带宽则因器件而异。
表 3 列出了 MagAlpha 系列中部分传感器的分辨率和带宽值。注意,部分传感器具有可配置的滤波器带宽,这使能够适应不同的应用要求。
表3: MagAlpha系列产品
| 产品型号 | 45mT时的分辨率(位) | 滤波器带宽(Hz) | 技术 | 典型应用 |
| MA600(MA600)(MA600(MA600)) | 14.5 至 12 | 150 至 13,00000 | TMR | 闭环位置/速度控制 |
| MA732 MA732 | 14 至 9 | 23 至 6000 | 霍尔 | 闭环位置/速度控制、通用位置传感器 |
| MA330 | 14 至 9 | 23 至 6000 | 霍尔 | 无刷直流电机换向 |
| MAQ430号 | 14 至 9 | 23 至 6000 | 霍尔 | 汽车 |
| MA 730 | 14 | 370 | 霍尔 | 高分辨率编码器 |
| MA704 | 10 | 3,00000 | 霍尔 | 闭环位置/速度控制 |
| MA780 | 12 至 8 | 39 至 160000 | 霍尔 | 低功耗 |
| MA800 | 8 | 90 | 霍尔 | HMI人机界面 |
从上表可以看出,与基于霍尔的传感器相比,内部采用 TMR 传感技术的 MA600(MA600)(MA600(MA600))传感器可以在较高带宽下实现出色的分辨率。
结语
本文从随机误差以及标准偏差和置信度的统计概念出发,解释了分辨率的定义。文章还阐明了数字表达(传感器输出端提供的比特位数)与传感器测量分辨率(以数字形式提供时)之间的区别。
通过展示滤波的影响,我们还证明了确定产品的实际性能需要同时考虑分辨率和带宽。文章提供了一个典型的磁性角度传感器数据手册示例,对如何正确解读其中的含义做出了说明。
审核编辑:彭菁
精密电阻与竞品差异解析")







采样电阻体积有哪些规格")


