
摘要:
本文介绍了用于分离式MEMS陀螺仪的全差分、低闪烁噪声、自动幅度控制(AAC)的ASIC。先分析了AAC中闪烁噪声对陀螺仪偏置不稳定性的影响。使用斩波器稳定的幅度检测器和误差放大器来消除闪烁噪声。二阶环路滤波器可以降低来自可变增益放大器(VGA)的闪烁噪声。ASIC采用TSMC0.35μmCMOS工艺制造,功耗为1mW,电源电压为3.3V。实验结果表明,陀螺仪驱动的幅度中的闪烁噪声分量大大降低。
1.介绍
如今,具有CMOS读出电路接口的MEMS陀螺仪由于其低成本,低功耗和小尺寸的优点在消费者和汽车市场中被采用。受其长期误差的限制,MEMS陀螺仪仅适用于这些应用,输出的角速率积分精度不是主要考虑因素,例如智能手机,游戏控制器和相机稳定系统。另一方面,在惯性导航系统(INS)中,MEMS陀螺仪的集成误差决定整体的航向精度。为了定期校正MEMS陀螺仪的集成误差,GPS在微惯性测量单元(MIMU)中是绝对必要的。随着新兴地区的兴起,需要长时间的独立惯性导航,如精确的车辆导航和增强现实技术。需要进一步改善MEMS陀螺仪的长期误差。
根据Allan方差,MEMS陀螺仪的输出误差可分为三个主要分量,即角度随机游走(ARW),偏置不稳定性和速率随机游走(RRW)。ARW主要由MEMS陀螺仪及其CMOS前端的白噪声贡献,通常决定陀螺仪的宽带和短期稳定性。RRW主要描述其由于环境因素(例如温度和应力)引起的漂移。偏置不稳定性代表陀螺仪的最终精度,其受到CMOS读出电路中闪烁噪声的限制。
对于车辆导航和增强现实,当GPS或其绝对定位传感器的信息丢失时,纯惯性导航的操作时间约为1-10分钟。已经证明,MEMS陀螺仪的偏置不稳定性在该时间尺度期间导致了其整体的集成误差。MEMS陀螺仪的偏置不稳定性的来源尚未得到很好的研究,并且没有报道相应的解决方案。
本文首先分析了AAC中闪烁噪声与陀螺仪偏置不稳定性之间的关系。随后,设计斩波稳定幅度检测器和误差放大器以消除其闪烁噪声,并采用二阶环路滤波器来衰减来自VGA的闪烁噪声。实验结果验证了所提出的AAC大大降低了陀螺仪驱动幅度中的闪烁噪声,并改善了其偏置不稳定性。
2. AAC的系统架构和噪声模型
图1给出了MEMS陀螺仪驱动环路的典型框图。在驱动回路中,驱动器前端将MEMS谐振器的运动电流转换为电压,并提供所需的增益以使振荡启动。当幅度检测器检测到Vx的即时振荡幅度,并将其与某个参考电压Vref进行比较时,来自误差放大器的产生的误差信号Vc通过VGA调节驱动环路增益,以实现稳定的振荡幅度,用作感测通道的解调参考,以区分输入角速率和正交误差。

由于MEMS陀螺仪的振荡频率约为10-100kHz,闪烁噪声标准CMOS工艺的转角频率约为1kHz,因此固有地消除了驱动前端中闪烁噪声的影响。相反,AAC中的电路来处理陀螺仪的驱动幅度,即近直流信号,幅度检测器,误差放大器和VGA的闪烁噪声直接与驱动幅度混合。在感测通道中进行相位敏感解调后,驱动振幅中的闪烁噪声出现在陀螺仪的角速率输出中,成为其偏置不稳定性的主要原因。图2给出了MEMS陀螺仪驱动环路的系统级噪声模型。当仅考虑其振幅时,H(s)代表MEMS谐振器的等效传递函数,其可表示为,
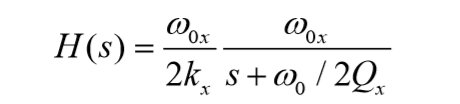
其中ω0x,Qx和kx表示陀螺仪的驱动谐振器的谐振频率,品质因数和刚度。Rx,KA,Ke,Kc代表驱动前端,幅度检测器,误差放大器和VGA的增益,L(s)是环路滤波器的传递函数。NA(s),Nref(s),NE(s),NV(s)代表幅度检测器,电压参考,误差放大器和VGA的噪声源。
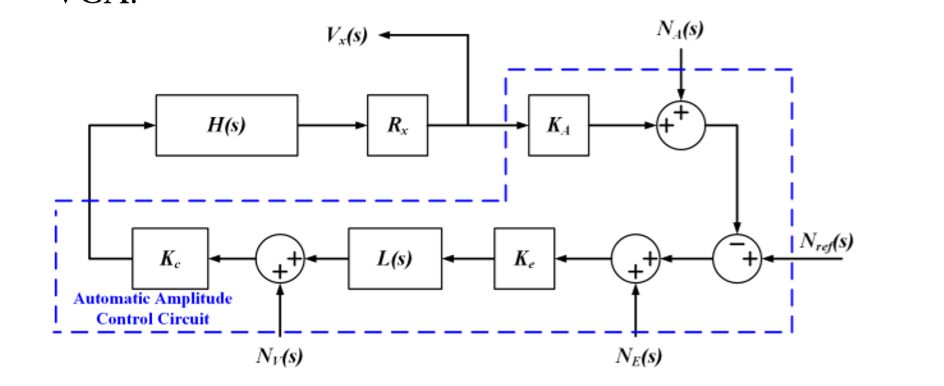
图2. MEMS陀螺仪驱动环路的噪声模型
当RxKAKeKcL(s)H(s)>> 1时,Vx(驱动前端输出电压)的输出噪声可以推导为。:

从等式(2)可知,来自VGA的噪声由环路滤波器整形,其噪声分量在KA≈1时直接转换为幅度噪声。NA(s),Nref(s),NE(s)和NV(s)中的闪烁噪声应该最小化,以改善陀螺仪的偏置不稳定性。
3.电路实现
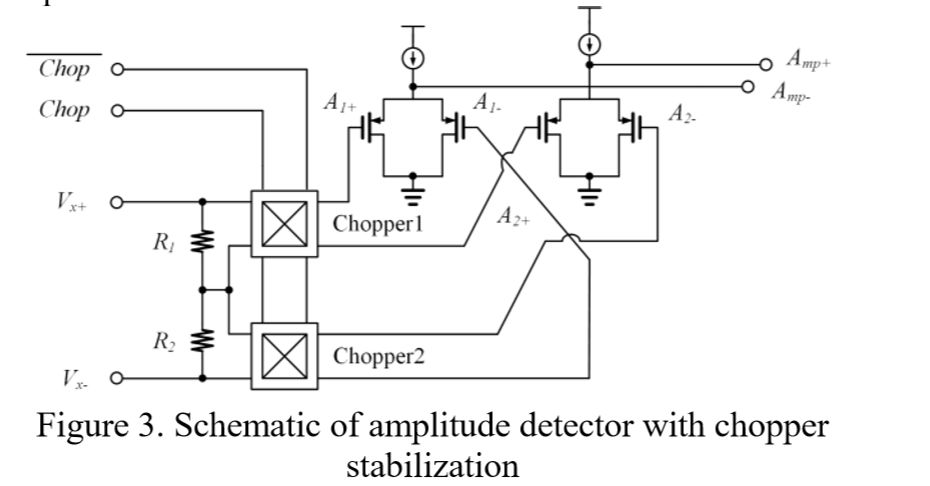
根据等式(2),为了消除NA(s)和NE(s)的闪烁噪声,在幅度检测器和误差放大器中应采用斩波器稳定。图3给出了具有斩波稳定性的幅度检测器的示意图。核心模块是一对交流电压跟随器,在亚阈值区域偏置,只跟随输入信号的负半周期。R1和R2提取输入共模电压。只有一个交流电压跟随器输出输入信号的幅度,而另一个输出共模电压同时输出共模电压,从而使其与差分工作模式兼容。
斩波幅度信号馈入误差放大器,其原理图如图4所示。其输入级是一个gm单元,将输入电压转换为电流。通过将两个gm单元的输出连接在一起,在电流域中完成振荡幅度和参考电压的比较。在斩波器4流到环路滤波器之前,误差电流被斩波器4变频到DC范围。
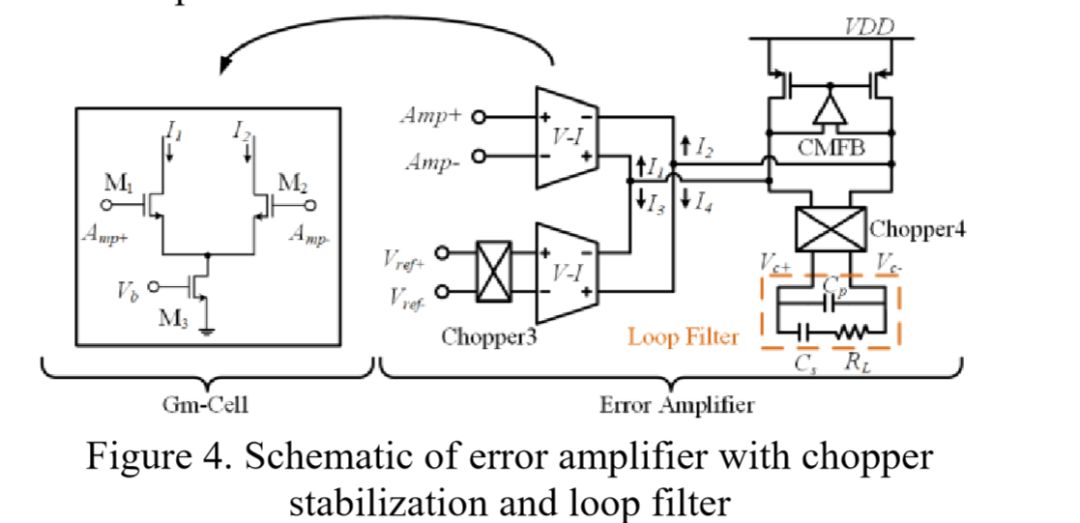
根据等式(2),在该设计中采用二阶环路滤波器,通过利用等式(3)中给出的积分分量来消除VGA的闪烁噪声。
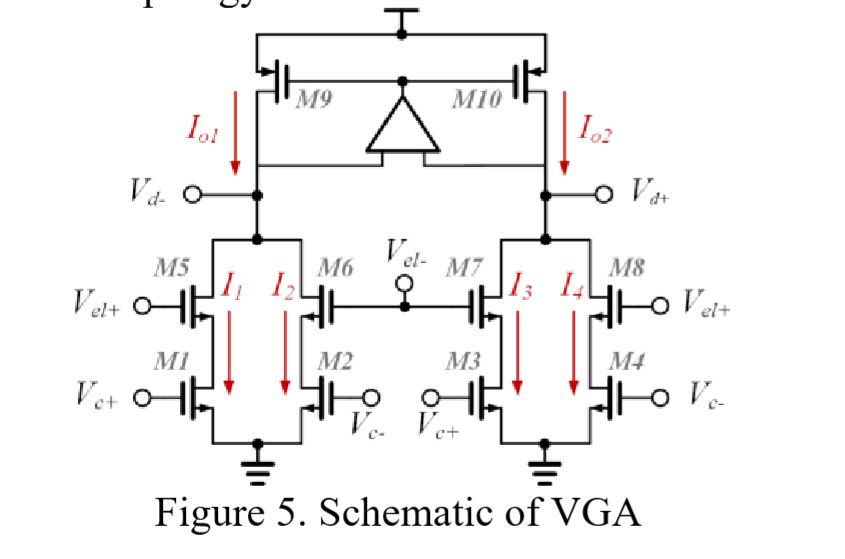
采用二阶环路滤波器后,VGA的设计限制大大减轻,其主要考虑因素是减小其扩展空间以扩大其调节范围。图5显示了这项工作中采用的VGA。与使用的Gilbert单元VGA相比,M1-M4在线性区域工作,尾电流源被消除,以增加其输出摆幅。误差放大器输出Vc调节M1-M4的抗衰减电阻,从而调节VGA输出幅度Vd,以保持稳定的振荡幅度。 可以通过全差分拓扑实现更好的线性度。
4.测试结果
CMOS读出电路采用TSMC0.35μm工艺制造,其芯片照片如图6所示。通过定制PCB与电压为3.3V的MEMS陀螺仪连接。
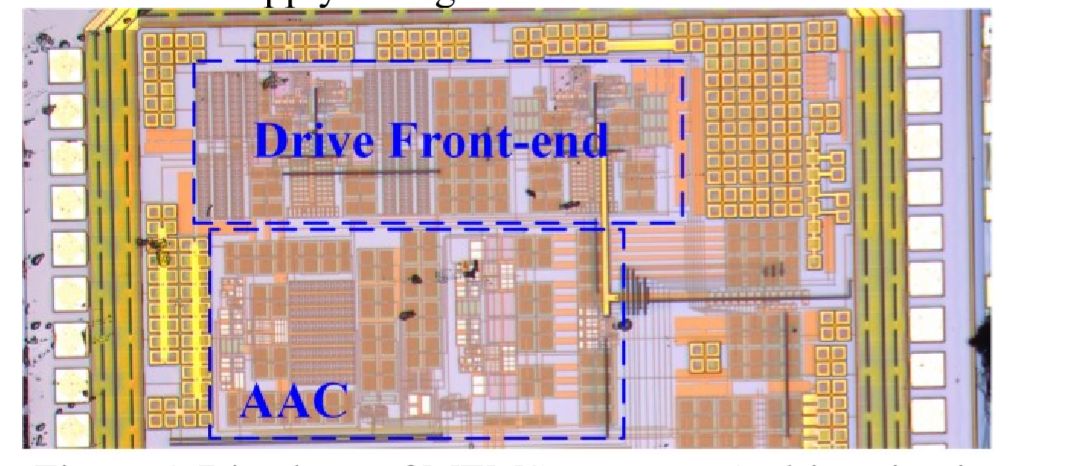
图6.是MEMS陀螺仪驱动电路的模拟照。MEMS陀螺仪的振荡启动过程如图7所示。表明AAC可以稳定振荡幅度,启动时间小于1s。
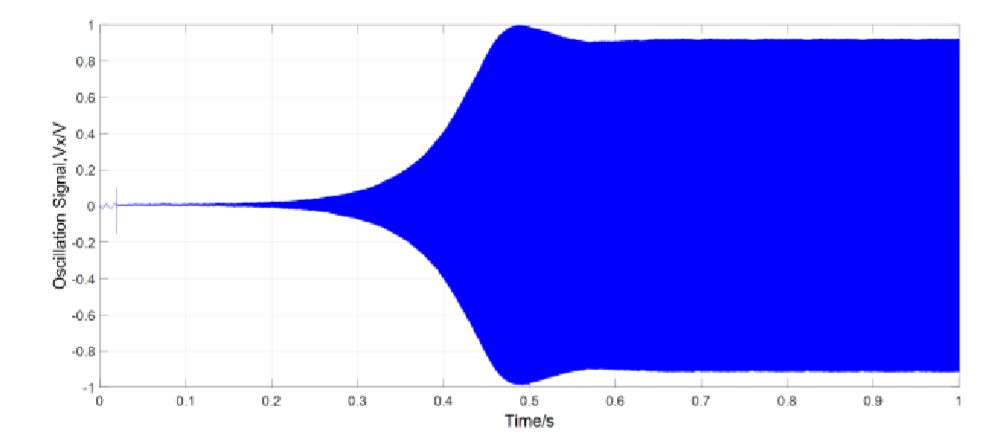
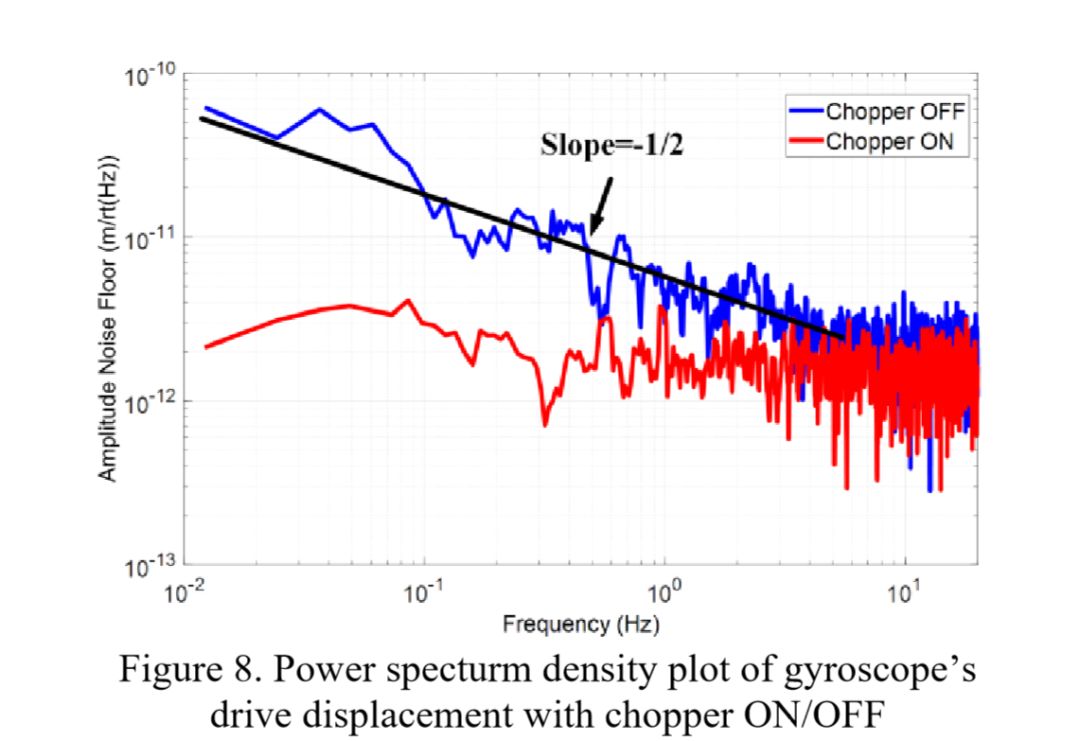
图7为振荡信号Vx的测试启动过程。为了研究AAC的闪烁噪声衰减效应,采用NI-DAQ板记录Vx的幅度,并将其转换为陀螺仪的机械位移以绘制其功率谱密度。如图8所示,当AAC中的斩波器关闭时,可以观察到明显的闪烁噪声分量,并且当斩波器开启时几乎看不到闪烁噪声,这肯定了所提出的低闪烁噪声AAC的有效性。
5.
本文提出了用于MEMS陀螺仪的低闪烁噪声自动幅度控制ASIC,采用TSMC0.35μm工艺制造,具有3.3V电源。采用斩波器稳定来消除幅度检测器和误差放大器的闪烁噪声以及二阶环路滤波器衰减VGA产生的闪烁噪声。实验结果表明,该AAC可以大大降低MEMS陀螺仪振荡幅度中的闪烁噪声。


合金电阻电压参数多少")
贴片电阻电流参数多少")




四端子电阻是什么")


