
功能介绍放开头, 使用便捷无需愁。
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
V1.5.0-STM32智能小车
V1.5.0:库函数开发。功能:循迹、避障、跟随、遥控、电池电压显示等。
视频合集链接推荐观看
[https://www.bilibili.com/video/BV1SY411L7rJ/?spm_id_fROM=333.337.search-card.all.clICk]
**V3.3.0-STM32智能小车 **
V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
视频合集链接推荐观看
[https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_fROM=333.337.search-card.all.clICk]
MPU6050姿态传感器使用(这个没有用视频也没有讲给大家自行扩展
使用)
温湿度传感器、光照传感器、摄像头模块都是大家自己可以扩展使用的其中摄像头教程再规划中
移植正点原子例程文件。

添加xxx.c 与xxx.h文件
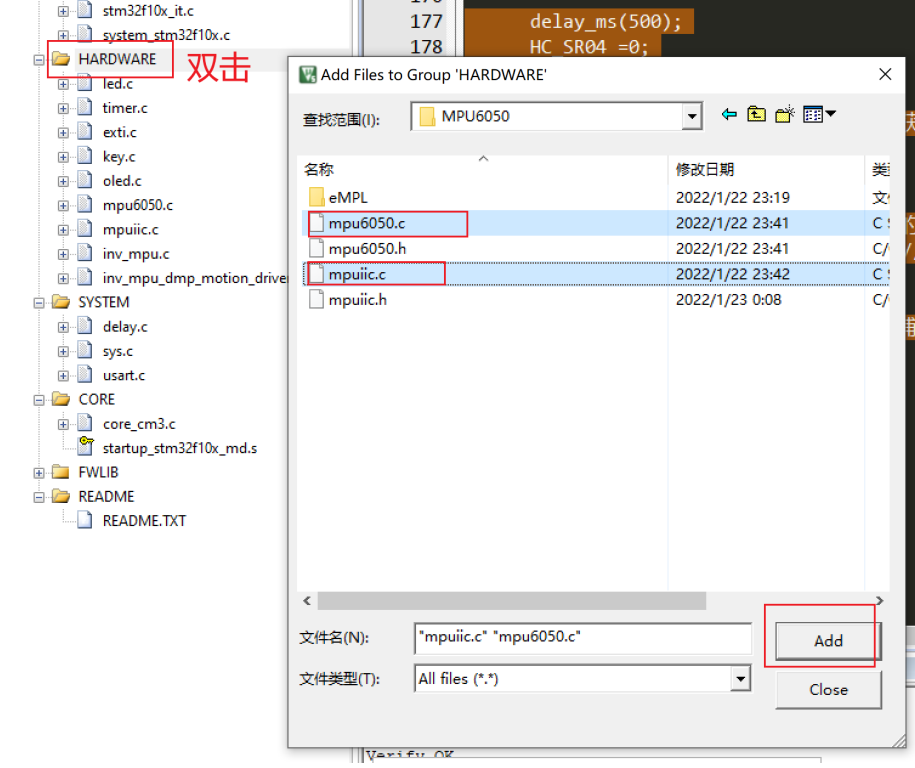
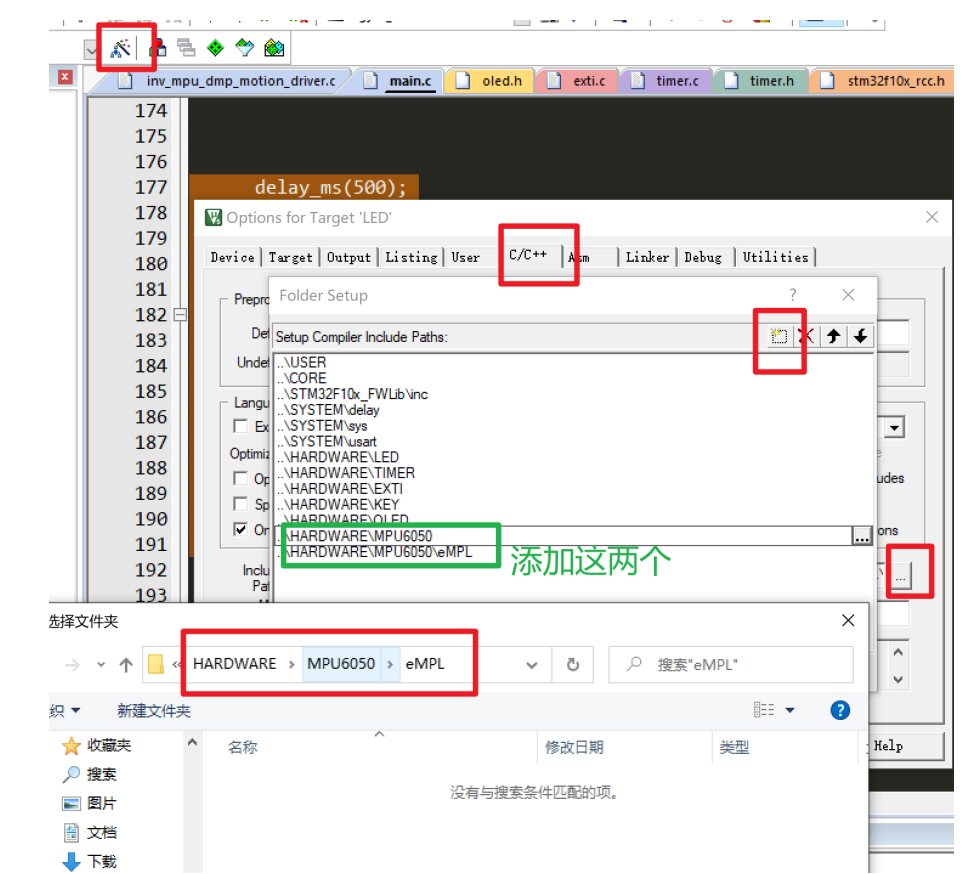
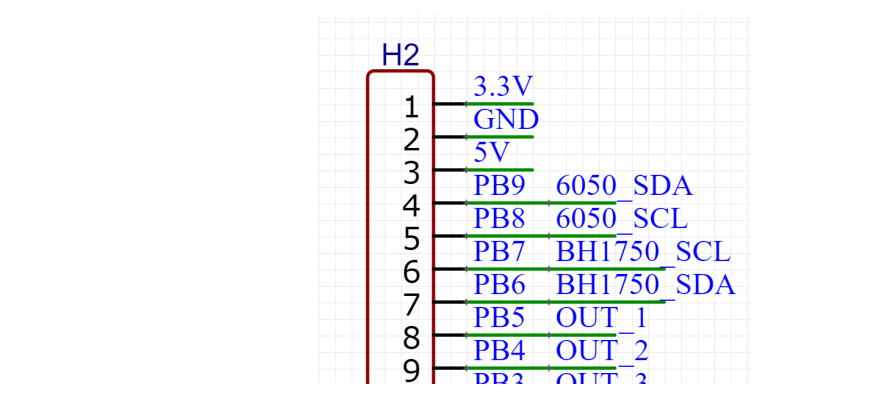
**如图 **
**6050_SDA--PB9 **
**6050_SCL--PB8 **
 " />
" />
更改mpuiic.c中的的MPU_IIC_Init(void) 函数
//初始化IICvoid MPU_IIC_Init(void){ GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//先使能外设IO PORTB时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_8; // 端口配置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIO GPIO_SetBits(GPIOB,GPIO_Pin_9|GPIO_Pin_8); //PB9,PB9输出高}更改mpuiic.h 相关宏
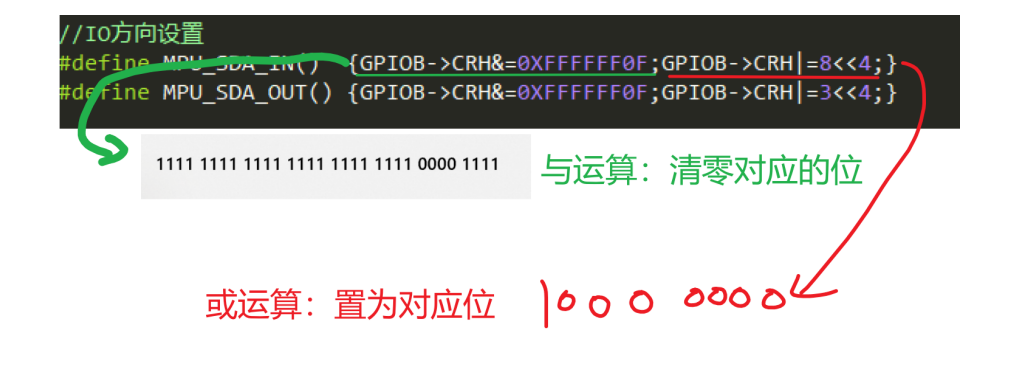
//IO方向设置#define MPU_SDA_IN() {GPIOB- >CRH&=0XFFFFFF0F;GPIOB- >CRH|=8< < 4;}//注意这里 容易出错#define MPU_SDA_OUT() {GPIOB- >CRH&=0XFFFFFF0F;GPIOB- >CRH|=3< < 4;}//IO操作函数 #define MPU_IIC_SCL PBout(8) //SCL#define MPU_IIC_SDA PBout(9) //SDA #define MPU_READ_SDA PBin(9) //输入SDA注意理解
//IO方向设置#define MPU_SDA_IN() {GPIOB- >CRH&=0XFFFFFF0F;GPIOB- >CRH|=8< < 4;}//注意这里 容易出错#define MPU_SDA_OUT() {GPIOB- >CRH&=0XFFFFFF0F;GPIOB- >CRH|=3< < 4;}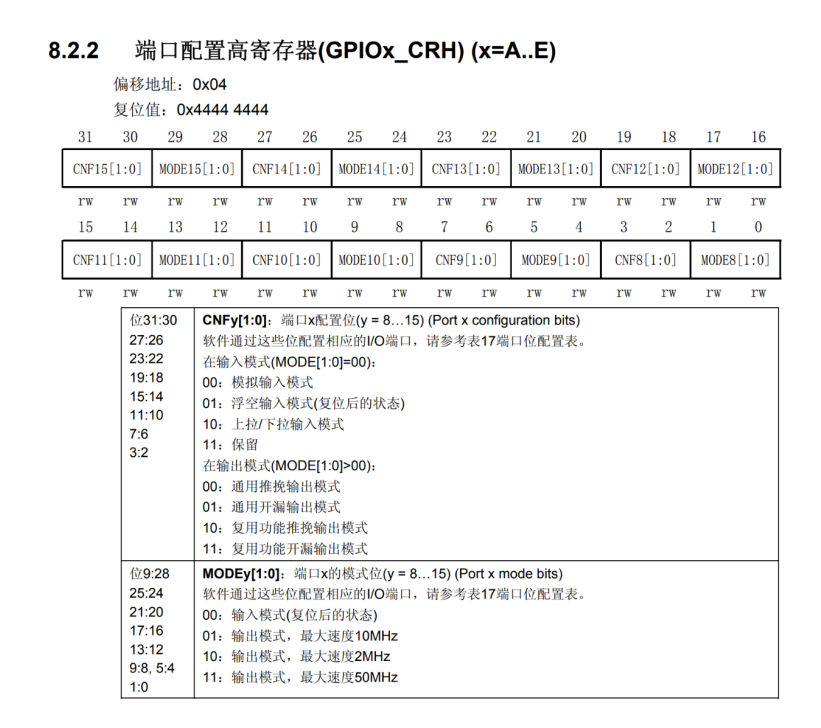 " />
" />
 " />
" />
检查6050其程序发现在mpu6050.c中有对PA15的初始化 我们需要将其注释掉,防止影响其程序。
在main.c声明部分变量
extern u8 TIM5CH1_CAPTURE_STA;//输入捕获状态 extern u16TIM5CH1_CAPTURE_VAL;//输入捕获值在main.c定义变量
float pitch,roll,yaw; //欧拉角short aacx,aacy,aacz;//加速度传感器原始数据short gyrox,gyroy,gyroz;//陀螺仪原始数据short temp;//温度初始化6050与mpu
MPU_Init();//初始化MPU6050 while(MPU_Init()!=0);while(mpu_dmp_init()!=0);通过mpu 获得数据
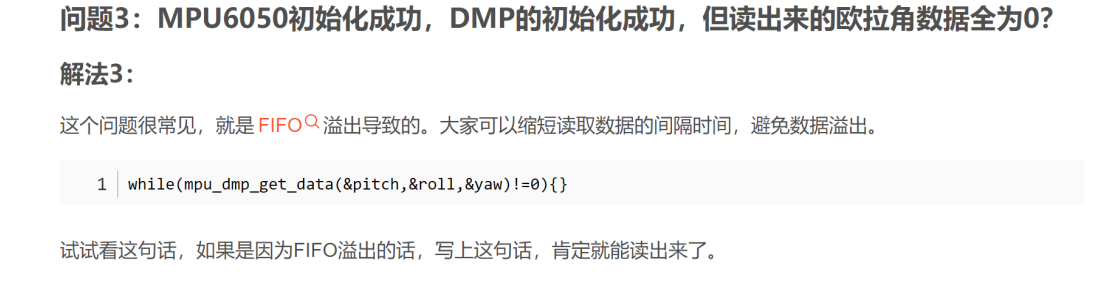
delay_ms(500);mpu_dmp_get_data(&pitch,&roll,&yaw);//返回值:0,DMP成功解出欧拉角 printf("nr 俯仰角=%0.2f 横滚角=%0.2f 偏航角=%0.2f nr", pitch,roll,yaw);发现读取数据为零,搜索发现
 " />
" />
然后尝试
delay_ms(500);while(mpu_dmp_get_data(&pitch,&roll,&yaw)!=0){}printf("nr 俯仰角=%0.2f 横滚角=%0.2f 偏航角=%0.2f nr", pitch,roll,yaw);可以获得数据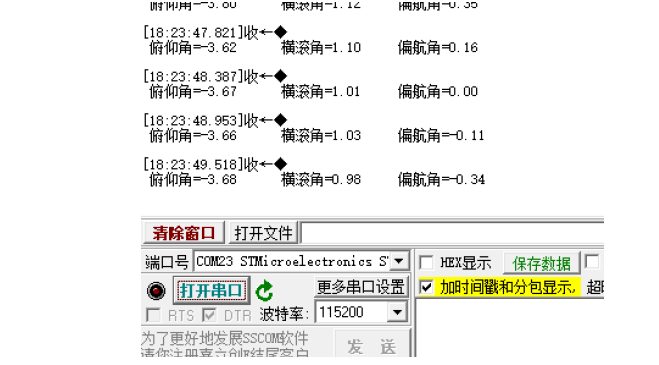
审核编辑 黄宇




NTC热敏电阻是什么封装参数多少")






