
“实名羡慕!为什么你家的机器人精准到能!绣!花!”
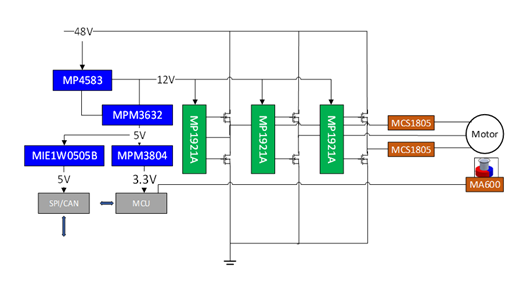
机器人的执行单元需要精确的位置定位来实现灵敏的机械控制。MA600 采用 TMR 技术检测磁场,是一款专用于运动控制的高灵敏度、高带宽、高分辨率的磁性位置传感器。
1.MA600 的关键规格
高精度:典型 0.2° INL,系统内校准后:小于 0.1° INL,包含片上查找表;
高带宽高分辨率,最高 14.5 位(±3σ);
无内部滞后,无延迟,减少速度带来的误差 ;
应用灵活,适配多种应用场景,支持最低磁场强度:20mT,支持轴装和侧装。
2. 误差的定义
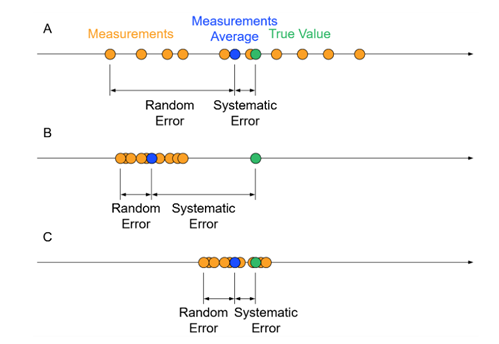
为了实现精准的位置定位,工程师在选型时,最关注的就是位置测量精度。检测误差被定义为一个参数的测量值与其真实值之间的差异,由两个部分构成:系统误差和随机误差。磁性编码器的系统误差由 INL,磁误差,延时三部分组成。随机误差由分辨率表示。
从下图可以看到误差组成对最终结果的影响,绿色圆形为真实值,蓝色为系统误差,黄色是随机误差。如果要达到比较好的精度,必须同时保证系统误差和随机误差。
2.1 分辨率
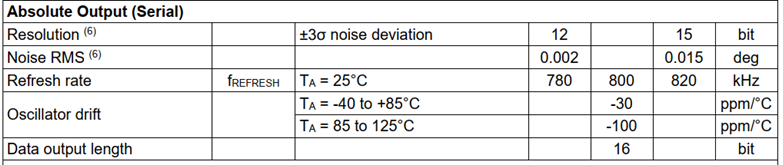
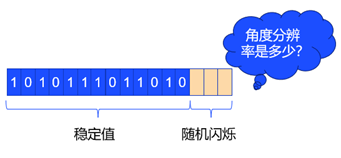
从规格可以看到,MA600 数据输出位数是 16 位,角度分辨率是 12 位到 15 位。实际角度分辨率到底应该以哪个数值为准?
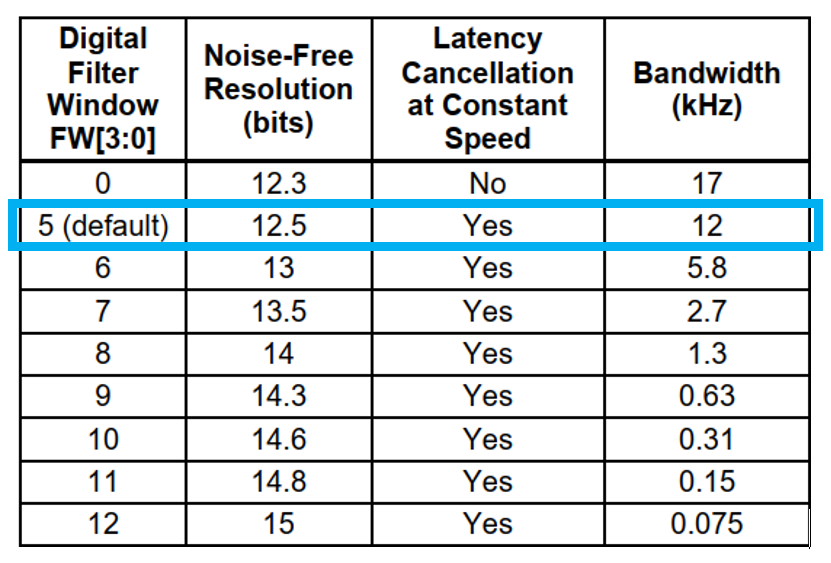
如果按照分辨率 16 位计算,角度精度是 0.0055 度,只有当实际噪声峰峰值小于 0.0055 度时,才能用数字输出位数表示角度分辨率,在大多数情况下噪声峰峰值通常超过 AD 步长。所以实际分辨率应该通过噪声峰峰值计算,即以 12 位到 15 位为准,具体可以通过寄存器设置,MA600 默认 12.5 位。
如果角度分辨率是 13 位,数据输出长度是 16 位,那么在读取角度寄存器的会看到输出端的最后三位数据随机闪烁,这是由噪声导致的:
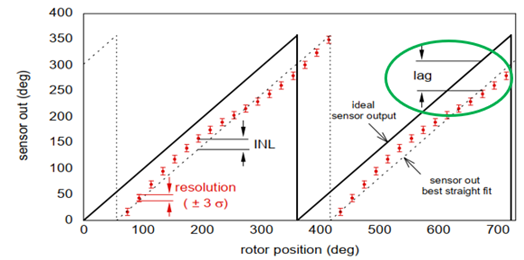
2.2 INL (积分非线性)
积分非线性是衡量位置传感器在整个测量范围内输出误差的一个重要指标。描述了传感器输出与理想拟合直线之间的最大偏差。一个低 INL 值意味着传感器的输出更加接近理想直线,从而提供更准确的测量结果。

MA600 的 INL 在环境温度 25℃,磁场强度为 45mT 的条件下,未经过用户校准的 INL 典型值为 0.2 度,最大不超过 0.6 度。
并且MA600 具有用户校准功能,可以校准因为磁铁配置不当引起的误差,包括磁铁的不对齐和磁铁本身的缺陷等。通过用户校准,MA600 的 INL 可以被减小到 0.1° 以内。

2.3 延时 Latency
延时是指数据准备好被读取的瞬间与轴通过该位置的瞬间之间的时间差。这个时间差会导致角度上的滞后,进而造成角度误差。下图展示了传感器输出与理想直线拟合之间的偏差,延时造成的角度误差即图中的 lag,计算公式为:
lag = latency × v
MA600 内部做了延时补偿,理论上不存在转速造成的误差。对比不同产品在 30krpm 下,由延时造成的角度误差。
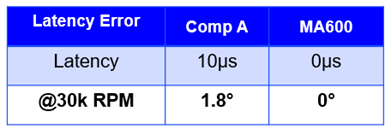
当延时为 10us 时,Comp A 的角度误差为 1.8 度,而 MA600 的误差为 0 度。这表明在高速旋转的场景,MA600 能够提供非常精确的角度测量。
2.4 温漂
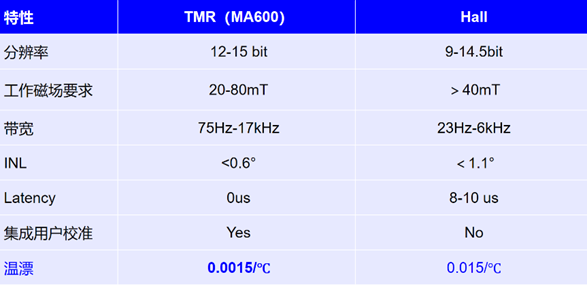
传感器对温度变化的敏感性也会引起输出信号的非线性变化或偏移。TMR 相比 Hall 有更强的温度稳定性,可以通过对比 Hall 传感器和 TMR 传感器 (MA600)看出,Hall 的典型温漂是 0.015deg/℃,MA600 是 0.0015deg/℃。在电机关节里面,工作温度达到 60 度,80 度都是有可能的。TMR 能保证温度变化下的角度稳定性。
3. 实际应用
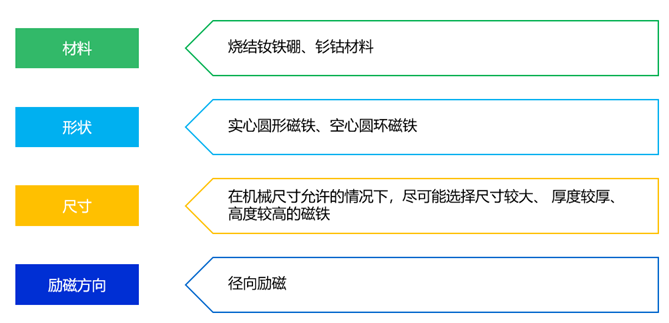
3.1 磁铁选型
3.2 MA600 安装位置仿真磁铁材料和形状确定之后,可以通过 MPS 的线上仿真软件进行磁场仿真,确定MA600 的安装位置。入口在 MPS 官网-设计-位置传感器设计支持-在线磁计算工具。
仿真根据实际装配位置选择轴装和侧装,MA600 允许的工作磁场强度是 20-200mT,为得到良好的初始线性度,推荐MA600 的磁场范围是 20-80mT。
具体操作步骤参考 MPS 中文论坛的帖子:MA600 磁铁如何选型。3.3 INL 校准:上位机一键校准

MA600 在应用时,可以通过用户校准功能将 INL 校准到 0.1 度以内,实现更高的精度。我们提供了测试板,通讯工具和上位机软件,可实现一键校准。
该校准方式为电机转动校准,使用光编作为参考信号,光编的 ABZ 连接到测试板上,测试板连接到上位机,将待测电机、光编、驱动电
机同轴安装, 驱动电机带动待测电机旋转,再通过上位机软件实现自动校准。
3.4 INL 校准:电机匀速转动校准
用户校准也可以在没有参考编码器的情况下进行,以速度 × 时间作为参考,计算芯片待校准角度处的校准值。
步骤如下:
1) 让电机以恒定速度旋转,推荐最大转速为 5krpm。
2) 校准流程如下:
为了准确拟合误差曲线,计算误差曲线的一次,二次,四次和八次谐波,作为MA600 输出的函数。
每 11.25°,使用拟合曲线计算校准值(度),并将得到的 32 个值从度转换为十进制。
将 32 个校准值存储到 NVM 中。
4. MA600 技术支持
MA600 相关的应用资料和例程可以通过添加工程师微信获取!
* 申请备注:公司/学校+应用
MA600 应用手册
磁铁选型指南
MA600 例程
MA600 上位机软件及应用手册

螺丝批有哪些分类?")

升功率电阻有什么特性和应用")



分流器有什么参数")



