
引言— 移动功能回顾
在前面两篇《如何制造足球机器人》文章中,我们主要围绕机器人本体进行了硬件设计,而这次将以控制器为中心,开展软件设计工作。在正式开始之前,先为大家回顾一下机器人如何实现移动功能的设计。
本体的移动采用三组名为“全向轮”的特殊轮胎,如下图 (图1) 所示。能够支持垂直方向的移动,从而实现八个方向的移动控制。
操作上,利用英飞凌的 3D 磁传感器设计了一个类似游戏机手柄的操纵杆,以控制机器人移动。此外新增三个按钮,分别实现右转、左转和停止功能,使控制器具备共计 11 种移动控制选项。下图 (图2) 为控制器的外观设计:
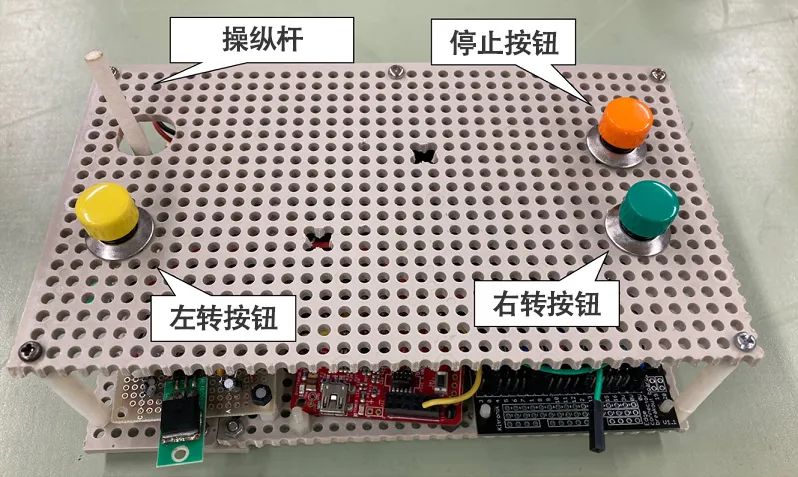
图2 控制器外观
控制器实现与控制原理
由于控制器需实现 11 种本体动作控制,因此每个条件使用 4 个 I/O 引脚向机器人本体发送信号。当发送信号时,为了判断动作是否与实际信号匹配,在机器人本体的四个角上安装了指示灯,以便对应每种动作信号的反馈情况。输入端口与反馈信号的对应关系如下表 (表1) 所示:
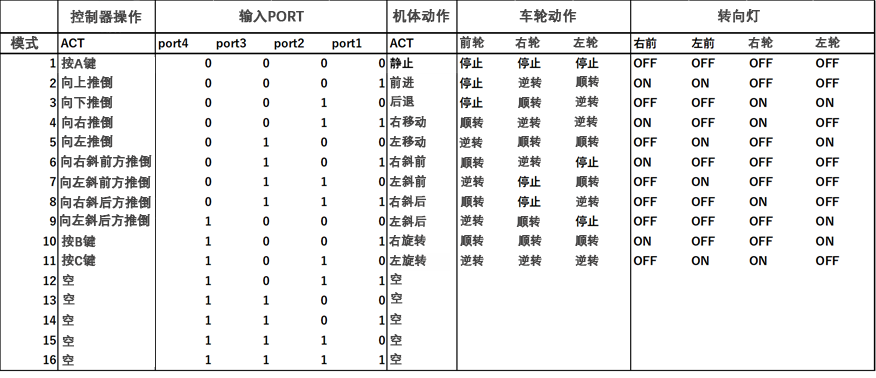
表1 控制器输入端口与和反馈信号的关系
控制器与 3D 磁传感器及微控制器 (MCU) 之间通过 I2C 通信协议进行信号传递,MCU 作为主控设备,3D 传感器作为从设备,实现各类信号的交换。下图 (图3) 显示了控制器工作的简单流程图:
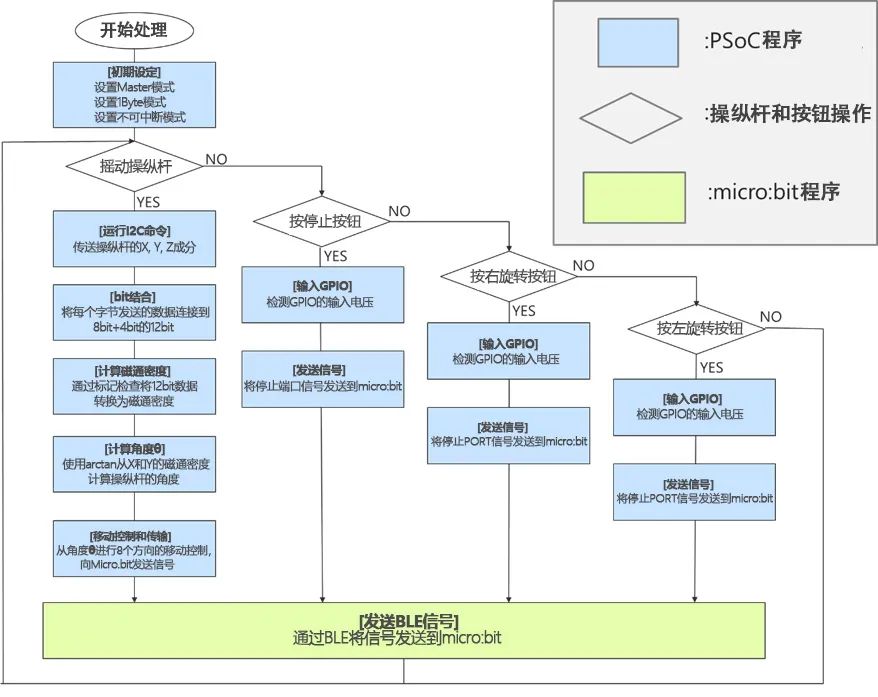
图3 控制器工作流程图
一. 当控制器打开时,微控制器将写入的 I2C 发送到 3D 传感器以更改初始设置,如下图 (图4) 所示:
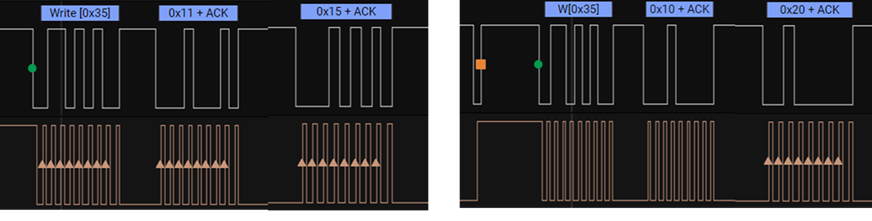
图4 I2C 主写入的波形
二. 通过移动操纵杆,MCU 接收来自 3D 传感器的因操纵杆倾斜生成的 3 轴磁通密度数据,并使用 X 轴和 Y 轴把 3 轴磁通密度信息转成操纵杆的角度 θ,如下图 (图5) 所示:
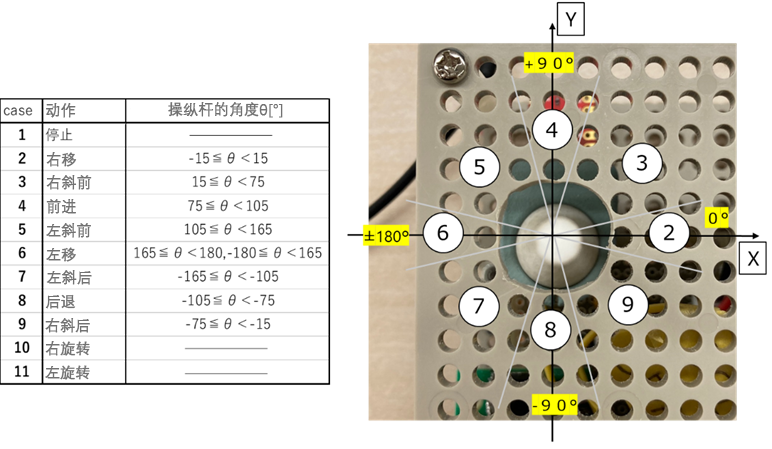
图5 操纵杆和角度检测
三. 当 MCU 向 3D 传感器读取数据时,使用 UART 进行调试,以便查看三个轴的磁通量密度和与磁通量密度对应的操纵杆角度 θ。
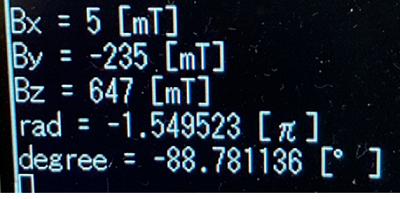
图6 I2C 主写入的波形
四. 根据计算出的角度 θ,MCU 通过无线通信将移动控制信号传输至机器人本体。五. 停止、左转、右转功能通过机械按钮实现,优先级最高,可覆盖其状态。
软件设计
在本项目中,使用的 MCU 是英飞凌的 PSoC 系列,这款产品支持模拟/数字电路的灵活配置,具备高度可定制化的特点。下图 (图7) 为英飞凌 PSoC 组件示例图:
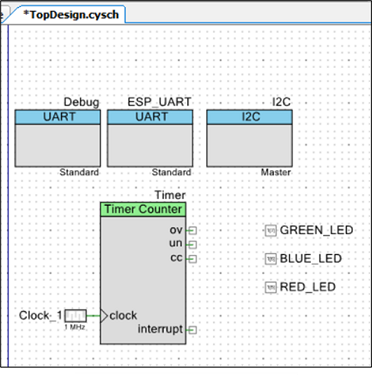
图7 英飞凌 PSoC 组件示例
本文主要介绍了制造足球机器人中的软件设计部分。


电流检测电阻有哪些区别")








